Infineon XMC4500 ARM Cortex-M4F Demo
Using GCC and the Atollic development tools
[RTOS Ports]
Introduction
The demo provided on this page is now obsolete and replaced by a new demo
and documentation page
This page documents a demo application that uses the FreeRTOS GCC ARM Cortex-M4F port.
It targets the Infineon XMC4000 Hexagon Development Kit CPU board, which is populated
with an XMC4500 microcontroller.
To use the port, the hardware floating point unit (the FPU, or VFP) must be switched on, and the
GCC compile time options must be set to generate hardware floating point instructions.
The FreeRTOS port layer will itself turn the FPU on immediately before the RTOS scheduler is
started, and the pre-configured demo application described on this page has all the
required compiler options.
The project can be configured to
create either a basic blinky style demo, or a more comprehensive test and demo
application.
IMPORTANT! Notes on using the FreeRTOS GCC XMC4000 demo project
Please read all the following points before using this RTOS port.
- Source Code Organisation
- The Demo Application
- RTOS Configuration and Usage Details
See also the FAQ My application does not run, what could be wrong?
Source Code Organisation
The FreeRTOS download contains the source code for all the FreeRTOS ports, so
includes many more files than are needed by this demo.
See the Source Code Organization
section for a description of the downloaded files and information on creating a
new project.
The Eclipse project file for this demo application is located in the
FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_GCC_Atollic
directory. The
Preparing the Eclipse Project section of this page contains
important information on setting up the demo project directory, and importing
the demo project into the Atollic IDE.
The Infineon XMC4500 Demo Application
The single Ecplise project provides two configurations. It can be configured as
a simple blinky style project, or a more comprehensive test and demo application.
The mainCREATE_SIMPLE_BLINKY_DEMO_ONLY definition, located at the top of main.c,
is used to switch between the two at compile time.
Functionality with mainCREATE_SIMPLE_BLINKY_DEMO_ONLY set to 1
Setting mainCREATE_SIMPLE_BLINKY_DEMO_ONLY to 1 results in main() calling
main_blinky(). main_blinky() sets up a very simple demo, as
described below.
-
The main_blinky() Function:
main_blinky() creates one queue, and two tasks. It then starts the
RTOS scheduler.
-
The Queue Send Task:
The queue send task is implemented by the prvQueueSendTask() function in main_blinky.c.
prvQueueSendTask() sits in a loop that causes it to repeatedly block for
200 milliseconds, before sending the value 100 to the queue that was created
within main_blinky(). Once the value is sent, the task loops back around to block for
another 200 milliseconds.
-
The Queue Receive Task:
The queue receive task is implemented by the prvQueueReceiveTask() function
in main_blinky.c. prvQueueReceiveTask() sits in a loop where it repeatedly blocks on
attempts to read data from the queue that was created within main_blinky(). When data
is received, the task checks the value of the data, and if the value equals
the expected 100, toggles the LED. The 'block time' parameter passed to
the queue receive function specifies that the task should be held in the Blocked
state indefinitely to wait for data to be available on the queue. The queue
receive task will only leave the Blocked state when the queue send task writes
to the queue. As the queue send task writes to the queue every 200
milliseconds, the queue receive task leaves the Blocked state every 200
milliseconds, and therefore toggles the LED every 200 milliseconds.
Functionality with mainCREATE_SIMPLE_BLINKY_DEMO_ONLY set to 0
Setting mainCREATE_SIMPLE_BLINKY_DEMO_ONLY to 0 results in main() calling
main_full(). main_full() sets up a comprehensive test and demo, which demonstrates:
-
Floating point context switching.
-
Malloc failed and stack overflow hook functions.
main.c also contains Tick and Idle hook functions, but FreeRTOSConfig.h is not configured to
use them. See the comments in the implementation of the functions in main.c.
-
Software timers.
-
Semaphores.
-
Mutexes.
-
Queues.
Some of the created tasks are from the set of standard demo
tasks, while others are specific
to this demo. Standard demo tasks are used by all FreeRTOS ports and demo applications.
They have no functional purpose, and exist just to demonstrate how to use the FreeRTOS API,
and test the FreeRTOS implementation.
main() creates 43 tasks before
starting the RTOS scheduler. The demo then dynamically and continuously creates and
deletes a further two tasks while it is running.
Application specific "register test" tasks are created in addition to the standard demo tasks.
These start by filling all the generic, and all the floating point registers, with known
values. The tasks then repeatedly check that
each register maintains the value written to it for the lifetime of
the tasks. The register check tasks run at the idle priority, so will exit and re-enter
the Running state frequently. The two register check
tasks each fill the CPU registers with different values, and a register containing an
unexpected value is symptomatic of an error in the context switching
mechanism.
A 'check' software timer is created that periodically inspects the standard
demo tasks, and register test tasks, to ensure all the tasks are functioning
as expected. The check software timer's
callback function toggles the single user LED on the XMC4500 Hexagon development kit
CPU board. This gives a visual feedback of the
system health. If the LED is toggling every 3 seconds, then the
check software timer has not discovered any problems. If the LED is
toggling every 200 milliseconds, then the check software timer has
discovered a problem in one or more tasks.
Hardware set up
The demo uses the LED that is soldered directly onto the CPU board PCB, so no
hardware set up is required.
Preparing the Eclipse project directory
Eclipse projects can be either standard makefile projects, or managed make projects.
The FreeRTOS Atollic ARM Cortex-M4F project uses a managed make project. This in
turn means that either:
-
All the source files needed to build the project must be located under
the folder/directory that contains the project file itself, or
-
The Eclipse workspace (note workspace, not project) needs to be
configured to locate the files elsewhere on the hard disk.
Option 1 is used for this demo. Therefore, the directory FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_GCC_Atollic
contains a batch file called CreateProjectDirectoryStructure.bat that
copies all the required FreeRTOS source files, and some standard demo application
files, into sub directories inside the demo project directory.
CreateProjectDirectoryStructure.bat must be executed before the Atollic
project is imported into the Eclipse workspace.
CreateProjectDirectoryStructure.bat cannot be
executed from within the Atollic IDE.
Importing the demo application into the Atollic Eclipse workspace
To import the necessary projects into an existing or new Eclipse Workspace:
-
Select "Import" from the Atollic "File" menu. The dialogue box shown below
will appear. Select "Existing Projects into Workspace".
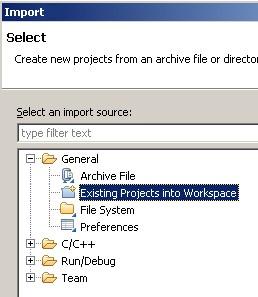 The dialogue box that appears when "Import" is first clicked
The dialogue box that appears when "Import" is first clicked
-
In the next dialogue box, select FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_GCC_Atollic
as the root directory. Then, make sure the RTOSDemo (rather than
"FreeRTOS-Simple-Demo", as depicted below)
project is checked in the "Projects" area, and that the Copy Projects Into
Workspace box is not checked, before clicking
the Finish button (see the image below for the correct check box states).
 Make sure the RTOSDemo project is checked (not FreeRTOS-Simple-Demo
Make sure the RTOSDemo project is checked (not FreeRTOS-Simple-Demo
as depicted), and "Copy projects into workspace" is not checked
Building and executing the demo application
-
Ensure the CreateProjectDirectoryStructure.bat batch file has been executed,
that the project has been imported into the Atollic workspace, and that
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY is set to generate the required
demo functionality, as noted above.
-
Ensure the target hardware is connected to the host computer using a
suitable interface. The project was created using a J-Link Lite.
-
Select 'Build All' from the IDE's 'Project' menu, the
RTOSDemo project should build without any errors or warnings.
-
After the project has built, click the "Debug" speed button in the IDE to
program the microcontroller flash memory, and start a debug session.
Cortex-M4F FreeRTOS port specific configuration
Configuration items specific to this demo are contained in FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_GCC_Atollic/FreeRTOSConfig.h.
The constants defined in this file can be edited to suit your application. In particular -
-
configTICK_RATE_HZ
This sets the frequency of the RTOS tick interrupt. The supplied value of 1000Hz is useful for
testing the RTOS kernel functionality but is faster than most applications need. Lowering the frequency will improve efficiency.
-
configKERNEL_INTERRUPT_PRIORITY and configMAX_SYSCALL_INTERRUPT_PRIORITY
See the RTOS kernel configuration documentation for full information on these configuration constants.
-
configLIBRARY_LOWEST_INTERRUPT_PRIORITY and configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY
Whereas configKERNEL_INTERRUPT_PRIORITY and configMAX_SYSCALL_INTERRUPT_PRIORITY
are full eight bit shifted values, defined to be used as raw numbers directly
in the ARM Cortex-M4F NVIC registers, configLIBRARY_LOWEST_INTERRUPT_PRIORITY
and configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY
are equivalents that are defined using just the 6 priority bits implemented in the XMC4000
NVIC.
These values are provided because the CMSIS library function NVIC_SetPriority()
requires the unshifted 6 bit format.
Attention please!: See the page dedicated to setting interrupt priorities on ARM Cortex-M devices. Remember that ARM Cortex-M cores use
numerically low priority numbers to represent HIGH priority interrupts. This
can seem counter-intuitive and is easy to forget! If you wish to assign an
interrupt a low priority do NOT assign it a priority of 0 (or other low numeric
value) as this will result in the interrupt actually having the highest priority
in the system - and therefore potentially make your system crash if this
priority is above configMAX_SYSCALL_INTERRUPT_PRIORITY. Also, do not leave
interrupt priorities unassigned, as by default they will have a priority of 0
and therefore the highest priority possible.
The lowest priority on a ARM Cortex-M core is in fact 255 - however different
Cortex-M microcontroller manufacturers implement a different number of priority bits and supply library
functions that expect priorities to be specified in different ways. For example,
on Infineon XMC4000 ARM Cortex-M4 microcontrollers, the lowest priority you can specify is in fact 63 - this is defined by the constant
configLIBRARY_LOWEST_INTERRUPT_PRIORITY in FreeRTOSConfig.h. The highest priority
that can be assigned is always zero.
It is also recommended to ensure that all six priority bits are assigned as
being preemption priority bits, and none as sub priority bits, as they are in the provided
demo.
Each port #defines 'BaseType_t' to equal the most efficient data type for that
processor. This port defines BaseType_t to be of type long.
Interrupt service routines
Unlike many FreeRTOS ports, interrupt service routines that cause a context switch have
no special requirements, and can be written as per the compiler documentation.
The macro portEND_SWITCHING_ISR() can be used to request a context switch from
within an interrupt service routine.
Note that portEND_SWITCHING_ISR() will leave interrupts enabled.
The following source code snippet is provided as an example. The interrupt
uses a semaphore to synchronise with a task (not shown), and calls portEND_SWITCHING_ISR
to ensure the interrupt returns directly to the task.
void Dummy_IRQHandler(void)
{
long lHigherPriorityTaskWoken = pdFALSE;
/* Clear the interrupt if necessary. */
Dummy_ClearITPendingBit();
/* This interrupt does nothing more than demonstrate how to synchronise a
task with an interrupt. A semaphore is used for this purpose. Note
lHigherPriorityTaskWoken is initialised to zero. */
xSemaphoreGiveFromISR( xTestSemaphore, &lHigherPriorityTaskWoken );
/* If there was a task that was blocked on the semaphore, and giving the
semaphore caused the task to unblock, and the unblocked task has a priority
higher than the current Running state task (the task that this interrupt
interrupted), then lHigherPriorityTaskWoken will have been set to pdTRUE
internally within xSemaphoreGiveFromISR(). Passing pdTRUE into the
portEND_SWITCHING_ISR() macro will result in a context switch being pended to
ensure this interrupt returns directly to the unblocked, higher priority,
task. Passing pdFALSE into portEND_SWITCHING_ISR() has no effect. */
portEND_SWITCHING_ISR( lHigherPriorityTaskWoken );
}
Only FreeRTOS API functions that end in "FromISR" can be called from an
interrupt service routine - and then only if the priority of the interrupt
is less than or equal to that set by the configMAX_SYSCALL_INTERRUPT_PRIORITY
configuration constant (or configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY).
Resources used by FreeRTOS
FreeRTOS requires exclusive use of the SysTick and PendSV interrupts. SVC number #0 is also used.
Switching between the pre-emptive and co-operative RTOS kernels
Set the definition configUSE_PREEMPTION within FreeRTOSConfig.h to 1 to use pre-emption or 0
to use co-operative. The full demo application may not execute correctly when the co-operative RTOS scheduler is
selected.
Compiler options
As with all the ports, it is essential that the correct compiler options are used. The best way to ensure this is to base your
application on the provided demo application files.
Memory allocation
Source/Portable/MemMang/heap_2.c is included in the ARM Cortex-M4F demo application project to provide the memory
allocation required by the RTOS kernel.
Please refer to the Memory Management section of the API documentation for
full information.
Miscellaneous
Note that vPortEndScheduler() has not been implemented.
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.
|










